在自動化控制技術中,PID控制與順序控制是經常被引用的控制模式,為能讓智慧儀器輸出控制需求到執行器,進而調節受控對象的動作狀態,故將PID控制及順序控制邏輯作成外掛式軟體元件,裨益自動控制系統導入的便捷性。
PID控制
PID控制是一種線性控制模式,由控制輸入量與響應輸出量的偏差,轉換成比例、積分、微分控制變量之線性組合函數,並按系統設定的狀態目標值進行響應快、振盪小、穩定快、誤差小的自動調節控制。

順序控制
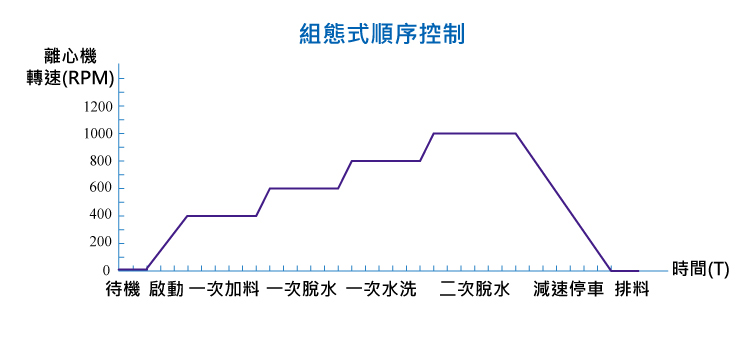
順序控制是依照預先所設定的時間或條件,並按所設定時間或條件順序執行每個動作或程序模組的自動操作。控制系統單一個或多個控制元件組合的單次驅動可表示為一個動作單元,每個動作單元可設定控制元件的開或關,如需要進行多個動作單元的操作,可將動作單元組成動作模組,並設定動作時間或動作停止(或啟動)的控制參數,之後再按動作單元及動作模組的操作時間或操作次數依序執行組態式(Configurable)順序控制。
順序控制參數配置範例

離心機變頻控制案例